L’année dernière nous avons décidé d’améliorer notre imprimante PrintrBot Plus ! Comme vous le savez, PrintrBot n’est plus (peut-être un retour prochainement d’après la dernière vidéo de Brook ?? let’s see 😉 ).
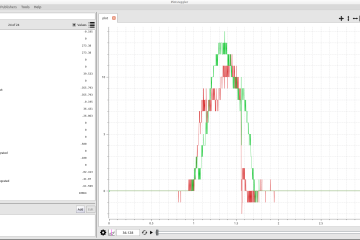
Nous sommes tombé sur klipper qui permet une meilleure gestion des déplacements et des vitesses des moteurs pas à pas en anticipant les déplacements.
Conclusion: moins de bruits des moteurs et une augmentation significative des déplacements de la vitesse d’impression (bien-sûr pas sur tous les mouvements, on est obligé de laisser le filament refroidir…)
Nous avons déjà commencé à collaborer avec KevinOConnor afin de bien prendre en compte la carte Printrboard et notre configuration.
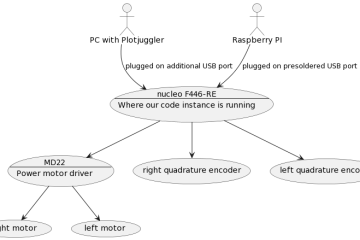
Le principe est simple. il suffit de l’installer (on a choisi de l’installer avec Octoprint sur une raspberry pi 3 (avec f2fs pour gagner en performance générale, ca fera partie d’une prochaine explication), puis de flasher la carte printrboard de l’imprimante.
A partir de là, c’est la raspberry qui va totalement contrôler l’imprimante, je m’explique… Avant, une simple commande en GCODE permettait directement à l’imprimante (via son firmware Marlin par exemple d’interpréter ce code et de l’exécuter en donnant des ordres aux moteurs.
Avec klipper, le gcode est interprété par le logiciel klipper sur la Raspberry Pi et c’est celle-ci qui envoie tous les ordres moteurs optimisés à l’imprimante qui ne sait comprendre que ces commandes bas niveau. Chaque événement de moteur pas-à-pas est planifié avec une précision de 25 microsecondes minimum.
Le logiciel n’utilise pas d’estimations cinématiques (telles que l’algorithme de Bresenham). Il calcule des temps pour chaque pas en fonction de la physique de l’accélération et de la physique de la cinématique de la machine. Le mouvement pas à pas est plus précis et se traduit par un fonctionnement plus silencieux et plus stable de l’imprimante.
Les avantages de l’utilisation de Klipper: https://www.klipper3d.org/Features.html

- très grandes précision des mouvements des moteurs: l’application calcule tous les mouvements précis, les compresse, les transmet au microcontrôleur qui les execute.
- augmentation du nombre de commandes par secondes même avec un processeur 8bit
- configuration via un simple fichier
- le code est portable et fonctionne sur ARM, AVR, PRU
- fonctionne avec OctoPrint
Nos infos sur l’impression 3D et PrintrBot https://github.com/pmrobotix/PrintrBot/wiki
Un très bon TUTO Installer et configurer Klipper
https://www.lesimprimantes3d.fr/forum/topic/20330-tuto-installer-et-configurer-klipper/
Photo imprimante : PM-ROBOTIX Image créé par www.slon.pics - fr.freepik.com