Cela faisait un bout de temps que l’on souhaitait utiliser les servomoteurs Dynamixel AX12, non pas juste comme des servomoteurs simple, mais avec toutes leurs capacités de réception de données.

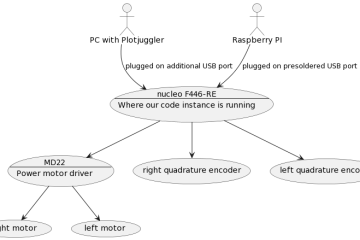
Pour cela, nous allons créer une carte d’interface dédiée via un microcontroleur PIC. Celui-ci nous permettra de garder la fréquence de dialogue à 1MHz, ainsi que de donner des ordres via le protocol I2C, plus simple pour nous avec le lego Mindstorm EV3 ou la carte linux Armadeus/OposSOM, ou bien une simple Arduino.
Voici la 1ère version de carte de prototypage

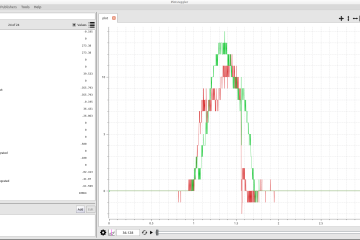
Et la preuve que l’on arrive bien à envoyer et recevoir des données
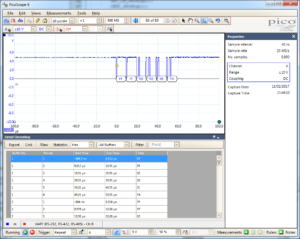
ok, vous avez raison, la trame de réception ne se voit pas sur la copie d’écran ci-dessus, on garde un certain suspens 😉
Merci Chaff pour ces débuts prometteurs !
La suite au prochain épisode…